miércoles, 9 de mayo de 2018
Cuestionario N°1 de robótica
- ¿Cuáles son los dispositivos de entrada de la robótica?
- ¿Cuáles son los dispositivos de salida de la robótica?
- ¿Qué es la robótica?
- ¿Qué es la ecuación en la robótica?
- ¿Qué es inteligencia artificial?
- ¿Qué es maquina reactiva?
- ¿Qué es máquina con conciencia propia?
- ¿Cuáles son la ventaja de la inteligencia artificial?
- ¿Cuáles son las desventajas de la inteligencia artificial?
- Mencione los tipos de inteligencia artificial
- ¿Cuál es el significado de robot poli articulado?
- ¿Cuál es la función del robot medico?
- ¿Cuál es la función del robot industrial?
- ¿Cuál es la función del robot Móvil?
- ¿Cuál es la función del robot Androide?
- ¿Cuál fue el creador de la robótica?
- ¿En qué año se inició el primer robot y como se llamó?
- ¿Cuáles son las leyes de la robótica?
- Mencione las ventajas y explique las ventajas de la robótica
- ¿Mencione y explique las Desventajas de la robótica?
- ¿Cuál es la función del robot androide en la ciencia?
- ¿Cuál es la función de la robótica en la ingeniería?
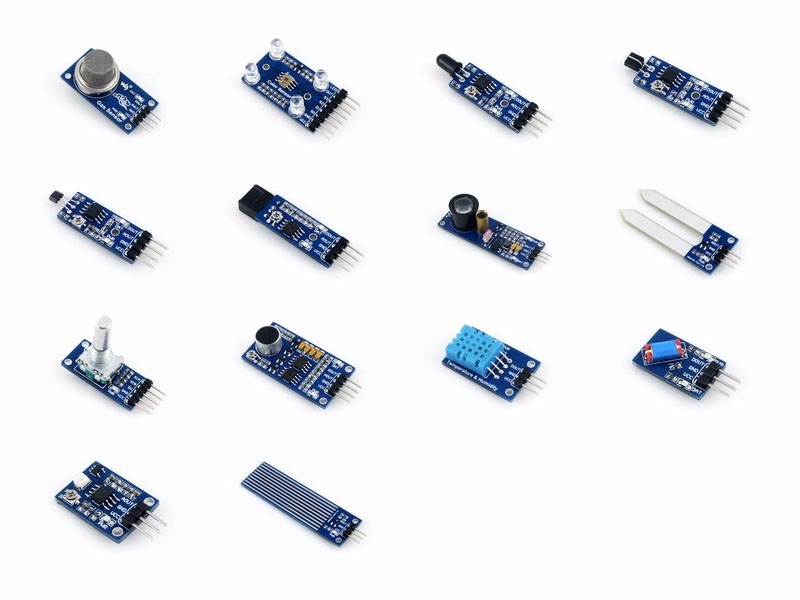
- ¿Qué son los sensores robóticos?
- ¿Cuál es la ventaja de los sensores robóticos?
- ¿Cuáles son las desventajas de los sensores robóticos?
- ¿Qué son los actuadores hidráulicos?
- Menciones los 3 tipos de componentes de un robot
- ¿Cuál es la función del robot hibrido?
- ¿Cuáles son las ventajas del robot hibrido?
- ¿Cuáles son las desventajas del robot hibrido?
- Mencione las partes del robot poli articulado
- Menciones los tipos de sensores robóticos
- Menciones las etapas de desarrollo de la robótica
- ¿Qué es algoritmo inteligente?
- ¿Cuál es el objetivo de la ingeniería industrial?
- ¿Cuáles son las características del robot hibrido?
- ¿Cuáles son los componentes principales de la robótica?
- ¿Cuál es la función del robot zoomórfico?
- ¿Cuáles son las Características del robot zoomórfico?
- ¿Cuáles son las Ventajas del robot zoomórfico?
- ¿Cuáles son las Desventajas del robot zoomórfico?
- ¿Que son los sensores de movimiento?
- ¿Que son los sensores de velocidad?
- ¿Que son los sensores De temperatura?
- ¿Que son los sensores Inclinación?
- ¿Que son los sensores De tacto?
- ¿Que son los sensores De sonido?
- ¿Que son los sensores De luz?
- ¿Que son los sensores Infrarrojos?
- ¿Qué es la robótica en la educación?
- Mencione y explique los diferentes tipos de ingeniería
Vocabulario N°1
- robot industrial
- robot de servicio.
- robot investigativo
- robot militares
- robot medico
- robot nano
- robot educativo
- robot de juguete
- robot imprimible
- robots antropomórficos
- robot escare
- robot delta
- robot con rueda
- robot oruga
- robot con patas zoomórficos
- robot aéreo
- robot marino
- robot humanoide o androides
- robot manipuladores
- robot Transformers
- robot cirujano
- robot enfermero
- robot agricultor


INVESTIGACIÓN N°1
- ¿Qué es la robótica?
- ¿Qué es robot?
- Característica de la robótica
- Ventajas y desventajas de la robótica
- Mencione y explique las áreas y aplicaciones de la robótica
- Elabore un cuadro comparativo sobre los conceptos de robótica
- Mencione o explique una pequeña historia de robótica
- Mencione la etapas del desarrollo de la robótica
- Mencione los dispositivos robóticos
- Mencione los elementos de entrada y salida de los dispositivos robóticos
- Mencione los diferentes sensores
- Que son sensores
TEMA N°1 ROBÓTICA
TEMA N°1
ROBÓTICA
La robótica es la rama de la Ingeniería mecatrónica, de la Ingeniería eléctrica, de la Ingeniería electrónica, de la Ingeniería mecánica, de la Ingeniería biomédica y de las ciencias de la computación que se ocupa del diseño, construcción, operación, disposición estructural, manufactura y aplicación de los robots.La robótica combina diversas disciplinas como son: la mecánica, la electrónica, la informática, la inteligencia artificial, la ingeniería de control y la física.3 Otras áreas importantes en robótica son el álgebra, los autómatas programables, la animatrónica y las máquinas de estados.El término robot se popularizó con el éxito de la obra R.U.R. (Robots Universales Rossum), escrita por Karel Čapek en 1920. En la traducción al inglés de dicha obra la palabra checa robota, que significa trabajos forzados o trabajador, fue traducida al inglés como robot.
La robótica va unida a la construcción de "artefactos" que trataban de materializar el deseo humano de crear seres a su semejanza y que al mismo tiempo lo descargasen de trabajos tediosos. El ingeniero español Leonardo Torres Quevedo (que construyó el primer mando a distancia para su automóvil mediante telegrafía, el ajedrecista automático, el primer transbordador aéreo y otros muchos ingenios), acuñó el término "automática" en relación con la teoría de la automatización de tareas tradicionalmente asociadas.
Karel Čapek, un escritor checo, acuñó en 1923 el término "Robot" en su obra dramática Rossum's Universal Robots / R.U.R., a partir de la palabra checa robota, que significa servidumbre o trabajo forzado. El término robótica es acuñado por Isaac Asimov, definiendo a la ciencia que estudia a los robots. Asimov creó también las Tres Leyes de la Robótica. En la ciencia ficción el hombre ha imaginado a los robots visitando nuevos mundos, haciéndose con el poder o, simplemente aliviando de las labores caseras.
Según su estructura
La estructura es definida por el tipo de configuración general del Robot, puede ser metamórfica. El concepto de metamorfismo, de reciente aparición, se ha introducido para incrementar la flexibilidad funcional de un Robot a través del cambio de su configuración por el propio Robot. El metamorfismo admite diversos niveles, desde los más elementales (cambio de herramienta o de efecto terminal), hasta los más complejos como el cambio o alteración de algunos de sus elementos o subsistemas estructurales. Los dispositivos y mecanismos que pueden agruparse bajo la denominación genérica del Robot, tal como se ha indicado, son muy diversos y es por tanto difícil establecer una clasificación coherente de los mismos que resista un análisis crítico y riguroso. La subdivisión de los Robots, con base en su arquitectura, se hace en los siguientes grupos: poliarticulados, móviles, androides, zoomórficos e híbridos.
1. Poliarticulados
En este grupo se encuentran los Robots de muy diversa forma y configuración, cuya característica común es la de ser básicamente sedentarios (aunque excepcionalmente pueden ser guiados para efectuar desplazamientos limitados) y estar estructurados para mover sus elementos terminales en un determinado espacio de trabajo según uno o más sistemas de coordenadas, y con un número limitado de grados de libertad. En este grupo, se encuentran los manipuladores, los Robots industriales, los Robots cartesianos y se emplean cuando es preciso abarcar una zona de trabajo relativamente amplia o alargada, actuar sobre objetos con un plano de simetría vertical o reducir el espacio ocupado en el suelo.
2. Móviles
Son Robots con gran capacidad de desplazamiento, basados en carros o plataformas y dotados de un sistema locomotor de tipo rodante. Siguen su camino por telemando o guiándose por la información recibida de su entorno a través de sus sensores. Estos Robots aseguran el transporte de piezas de un punto a otro de una cadena de fabricación. Guiados mediante pistas materializadas a través de la radiación electromagnética de circuitos empotrados en el suelo, o a través de bandas detectadas fotoeléctricamente, pueden incluso llegar a sortear obstáculos y están dotados de un nivel relativamente elevado de inteligencia.
3. Androides
Son los tipos de Robots que intentan reproducir total o parcialmente la forma y el comportamiento cinemático del ser humano. Actualmente, los androides son todavía dispositivos muy poco evolucionados y sin utilidad práctica, y destinados, fundamentalmente, al estudio y experimentación. Uno de los aspectos más complejos de estos Robots, y sobre el que se centra la mayoría de los trabajos, es el de la locomoción bípeda. En este caso, el principal problema es controlar dinámica y coordinadamente en el tiempo real el proceso y mantener simultáneamente el equilibrio del Robot. Vulgarmente se los suele llamar "Marionetas" cuando se les ven los cables que permiten ver como realiza sus procesos.
4. Zoomórficos
Los Robots zoomórficos, que considerados en sentido no restrictivo podrían incluir también a los androides, constituyen una clase caracterizada principalmente por sus sistemas de locomoción que imitan a los diversos seres vivos. A pesar de la disparidad morfológica de sus posibles sistemas de locomoción es conveniente agrupar a los Robots zoomórficos en dos categorías principales: caminadores y no caminadores. El grupo de los Robots zoomórficos no caminadores está muy poco evolucionado. Los experimentos efectuados en Japón basados en segmentos cilíndricos biselados acoplados axialmente entre sí y dotados de un movimiento relativo de rotación. Los Robots zoomórficos caminadores multípedos son muy numerosos y están siendo objeto de experimentos en diversos laboratorios con vistas al desarrollo posterior de verdaderos vehículos terrenos, pilotados o autónomos, capaces de evolucionar en superficies muy accidentadas. Las aplicaciones de estos Robots serán interesantes en el campo de la exploración espacial y en el estudio de los volcanes.
5. Híbridos
Estos Robots corresponden a aquellos de difícil clasificación, cuya estructura se sitúa en combinación con alguna de las anteriores ya expuestas, bien sea por conjunción o por yuxtaposición. Por ejemplo, un dispositivo segmentado articulado y con ruedas, es al mismo tiempo, uno de los atributos de los Robots móviles y de los Robots zoomórficos.
a que a continuación se presenta es la clasificación más común:
1.ª Generación.
Robots manipuladores. Son sistemas mecánicos multifuncionales con un sencillo sistema de control, bien manual, de secuencia fija o de secuencia variable.
2.ª Generación.
Robots de aprendizaje. Repiten una secuencia de movimientos que ha sido ejecutada previamente por un operador humano. El modo de hacerlo es a través de un dispositivo mecánico. El operador realiza los movimientos requeridos mientras el robot le sigue y los memoriza.
3.ª Generación.
Robots con control sensorizado. El controlador es una computadora que ejecuta las órdenes de un programa y las envía al manipulador para que realice los movimientos necesarios.
4.ª Generación.
Robots inteligentes. Son similares a los anteriores, pero además poseen sensores que envían información a la computadora de control sobre el estado del proceso. Esto permite una toma inteligente de decisiones y el control del proceso en tiempo real.
lunes, 7 de mayo de 2018
¿Cuales son las ingenierías de la robótica?

- Ing. Electrónica
- Ing. Mecatrónica
- Ing. Biomédica
- Ing. Electrica
- Ing. De sistemas de computación
¿Que es la robótica en la educación?

Es aquella que busca inculcar la robótica de forma amigable para las nuevas generaciones
¿Que son sensores infrarrojos?

Es un sensor medidor de distancia que se basa en un sistema de emisión y recepción de radiación.
¿Que son los sensores de luz?

Es uno de los sensores que le da visión al robot y responde al cambio e intensidad de la luz
¿Que son sensores de sonido?

Captan señales analógicas del sonido del ambiente trasformándolas a digital.
¿Que son los sensores de inclinación?

Miden ángulos en 1 o 2 ejes, se basan en la robusta tecnología MEMS.
¿Que son sensores de temperatura?

Son aquellos que trasforman los cambios de temperatura en cambios de señales digitales.
¿Que son los sensores de velocidad?

/GettyImages-545864205-5723abfc5f9b589e3465443d.jpg)

Características de los robots zoomorficos

- Se pueden incluir a la clase de robots androides
- Imitan a diversos seres vivos

Componentes principales de la robótica

- Dispositivos de entrada
- Dispositivos de salida
- Dispositivos de control
Características del robot híbrido

Es armado con piezas de diferentes tipos de robots obteniendo sus capacidades
Objetivos de inteligencia artificial

- Emular el pensamiento humano
- La automatización de actividades
- El modelo es el funcionamiento de la mente humana
¿Que es algoritmo inteligente?

Etapas de desarrollo de la robótica

2a fase a principios de los 60's
3a fase 1970
5a fase 1980
domingo, 6 de mayo de 2018
Tipos de Sensores roboticos

- Proximidad
- Magnéticos
- Temperatura
- Sonido
- Presión
- Iluminación
- Inclinación
- Microinterruptores


Ventajas de los robots híbridos

- Compatibilidad con múltiples piezas
- Bajo costo de producción
- Son móviles
¿Que son robots híbridos?


¿Que son los actuadores hidráulicos?

viernes, 4 de mayo de 2018

Ventajas de los sensores robóticos
- Simplicidad y robustez en la construcción
- Pequeñas dimensiones
- Resultados casi siempre precisos
¿Que son los sensores robóticos?
Son aquellos que detectan y son capaces de reportar lo detectado en el ambiente.
¿Función de la robótica en la ingeniería?


Desventajas de la robótica

- Pueden ser peligrosos
- Desplazamiento de mano de obra humana
- Pueden ser hackeados

¿Cuales son las leyes de la robótica?

- Un robot no hará daño a un ser humano, ni permitirá con su inacción que sufra daño.
- Un robot debe cumplir las órdenes dadas por los seres humanos, a excepción de aquellas que entrasen en conflicto con la primera ley.
- Un robot debe proteger su propia existencia en la medida en que esta protección no entre en conflicto con la primera o con la segunda ley.


¿Cual es el significado de robot móvil?

Tienen la capacidad de moverse en su entorno y no tienen una ubicación fisica
¿Cual es el significado de robot industrial?

Es un robot manipulador multifuncional reprogramable, capaz de mover materias.piezas, herramientas o dispositivos

miércoles, 2 de mayo de 2018
¿Que son los robots poliarticulado?

Básicamente se trata de brazos de robot sedentarios, configurados para mover sus elementos terminales (pinzas de sujeción, herramientas, elementos de soldadura...) en un determinado espacio de trabajo, según uno o más sistemas de coordenadas.
Mencione los tipos de inteligencia artificial

Máquinas reactivas
Máquinas con memoria limitada
Máquinas con una Teoría de la Mente
MÁQUINAS CON CONCIENCIA PROPIA
¿Cuales son las desventajas de la inteligencia artificial?

- Por ser software, requieren de constantes actualizaciones (mantenimiento).
- Realizar estos sistemas expertos requiere de mucho tiempo y dinero.
- Crear máquinas que sean autosuficientes y puedan ir desplazando a la raza humana.
- El uso irracional y exagerado de esta tecnología podría conllevar a la dominación de las máquinas sobre el hombre, como también llegar a depender mucho de ellas.
- El hombre se siente menos importante cuando una máquina o un sistema “lo supera”.
¿Cuales son las ventajas de la inteligencia artificial?

- En el ámbito laboral reduce los costos y salarios adicionales.
- Por resultar un atractivo, conlleva a generar más ingresos.
- Se han desarrollado aplicaciones que realizan tareas que el hombre nunca hubiera podido hacer debido a su complejidad.
- Puede predecir situaciones a largo plazo.
- Reduce el tiempo que consume realizar cierta actividad.
- Lograr grandes hallazgos y avances.
¿Que es maquina con consciencia propia?

Máquinas que expanden la teoría de la mente, son conscientes de sí mismas y entienden el concepto de uno mismo en relación con los demás. Hintze lo explica como la diferencia entre “querer algo y saber que quieres algo”. Las entidades son conscientes de sí mismas y de sus estados internos de ser o sentimientos, y como tales, pueden predecir las emociones de los demás. Todavía no tenemos ninguna de estas máquinas, computadoras o robots de este tipo.
¿Que es máquina reactiva ?
Son el estado mas básico de la inteligencia artificial. No se almacenan recuerdos ni se utilizan para la toma de decisiones.
¿Que es inteligencia artificial?

Programa de computación diseñado para realizar determinadas operaciones que se consideran propias de la inteligencia humana, como el auto aprendizaje.
¿Que es ecuación en robótica?

Es la relación que liga las aceleraciones generalizadas a las coordenadas de posición y sus velocidades.
¿Que es la robótica?

Técnica que se utiliza en el diseño y la construcción de robots y aparatos que realizan operaciones o trabajos, generalmente en instalaciones industriales y en sustitución de la mano de obra humana.
¿Cuales son los dispositivos de salida de la robótica?

Son los elementos que queremos controlar. Los más habituales en nuestros proyectos son: motores, bombillas, diodos, timbres, zumbadores, relés, electroválvulas, vávulas, cilindros neumáticos, etc.
Suscribirse a:
Comentarios (Atom)