A veces crearás un proyecto o un robot que no se comportará como habías pensado. Recuerda que tu placa controladora es el cerebro de tu máquina, pero es mucho más limitado que un cerebro humano.
|  |
| |
| Utilizando una placa ZUM o similares, todos los actuadores que utilicemos irán conectados a un pin digital. Hay actuadores, como un LED, que solo tienen dos estados, mientras otros como un servomotor, pueden tener múltiples posiciones y por tanto ser analógicos. Para este tipo de actuadores nuestra placa, que es digital, se servirá de un truco o método conocido como señal PWM. De momento no te preocupes por ella, veremos su utilidad más adelante. |  |

| Un sensor analógico puede tener múltiples estados siendo capaz de transformar la cantidad de luz, temperatura u otros elementos físicos en un valor comprendido entre 0 y 1023. Un ejemplo de sensor analógico es un sensor de luz, donde dependiendo de la cantidad de luz que el sensor recibe dará un valor mayor o menor. En una placa ZUM o similar los sensores analógicos irán conectados en los pines A0-A5. |

 |

 No es necesario extenderse mucho sobre estos componentes (llamados "microswitch" en inglés), muy comunes en la industria y muy utilizados en equipos electrónicos y en automatización.
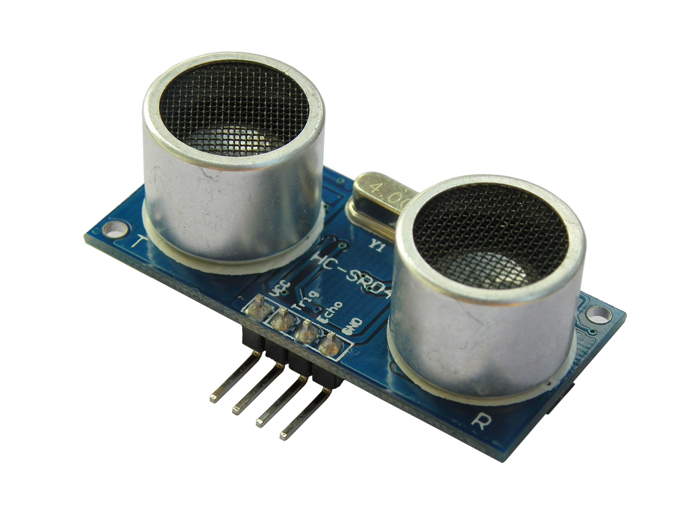
No es necesario extenderse mucho sobre estos componentes (llamados "microswitch" en inglés), muy comunes en la industria y muy utilizados en equipos electrónicos y en automatización. Los medidores ultrasónicos de distancia que se utilizan en los robots son, básicamente, un sistema de sonar. En el módulo de medición, un emisor lanza un tren de pulsos ultrasónicos y espera el rebote, midiendo el tiempo entre la emisión y el retorno, lo que da como resultado la distancia entre el emisor y el objeto donde se produjo el rebote. Se pueden señalar dos estrategias en estos medidores: los que tienen un emisor y un receptor separados y los que alternan la función (por medio del circuito) sobre un mismo emisor/receptor piezoeléctrico. Este último es el caso de los medidores de distancia incluidos en las cámaras Polaroid con autorango, que se obtienen de desarme y se usan en la robótica de experimentación personal.
Los medidores ultrasónicos de distancia que se utilizan en los robots son, básicamente, un sistema de sonar. En el módulo de medición, un emisor lanza un tren de pulsos ultrasónicos y espera el rebote, midiendo el tiempo entre la emisión y el retorno, lo que da como resultado la distancia entre el emisor y el objeto donde se produjo el rebote. Se pueden señalar dos estrategias en estos medidores: los que tienen un emisor y un receptor separados y los que alternan la función (por medio del circuito) sobre un mismo emisor/receptor piezoeléctrico. Este último es el caso de los medidores de distancia incluidos en las cámaras Polaroid con autorango, que se obtienen de desarme y se usan en la robótica de experimentación personal.
 El giróscopo o giroscopio está basado en un fenómeno físico conocido hace mucho, mucho tiempo: una rueda girando se resiste a que se le cambie el plano de giro (o lo que es lo mismo, la dirección del eje de rotación). Esto se debe a lo que en física se llama "principio de conservación del momento angular".
El giróscopo o giroscopio está basado en un fenómeno físico conocido hace mucho, mucho tiempo: una rueda girando se resiste a que se le cambie el plano de giro (o lo que es lo mismo, la dirección del eje de rotación). Esto se debe a lo que en física se llama "principio de conservación del momento angular". |
 |

 |